
国产滞环电流控制无桥图腾柱PFC:CCM和CRM PFC的实现原理和仿真模型
在之前的文章中介绍了滞环电流模式控制的 DCDC 的实现和仿真建模过程:《国产滞环电流控制的无桥图腾柱 PFC 介绍 第一部分》,而本文将介绍由滞环电流模式控制的 PFC 实现和仿真建模过程。
就 PFC 的控制目的来说,都是控制流入电感的电流呈正弦并跟随输入电网的电压。
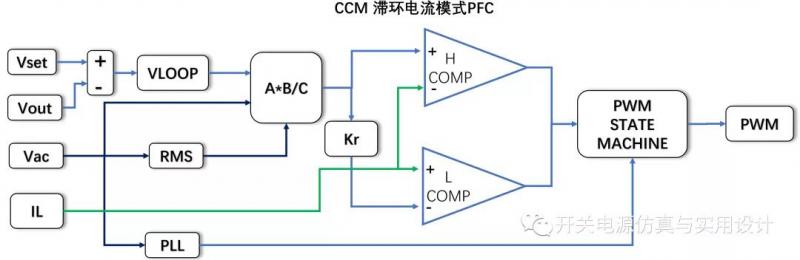
从实现的手段来看,CCM 的平均电流模式,是依靠电压电流双闭环控制来实现,可见图一所示。
电流内环控制电感的平均电流,然后电压环的输出乘以电网电压来产生电流内环的跟踪指令。
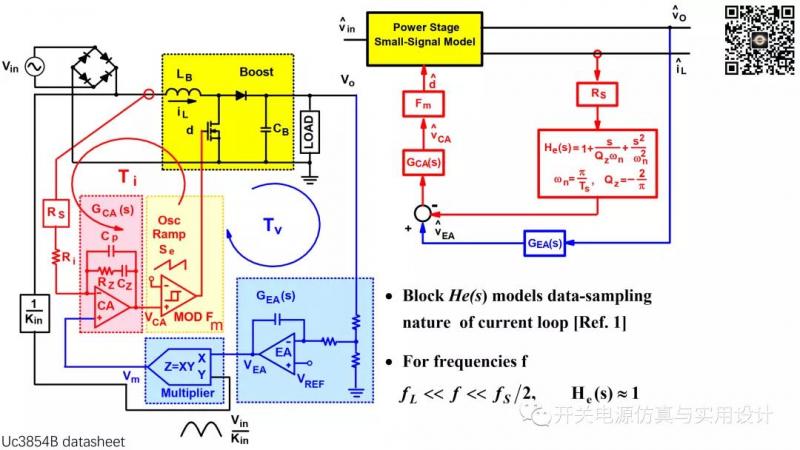 (图一 平均电流模式 PFC 的控制)下图是使用平均电流模式控制的 PFC 输入电压和电流波形:
(图一 平均电流模式 PFC 的控制)下图是使用平均电流模式控制的 PFC 输入电压和电流波形: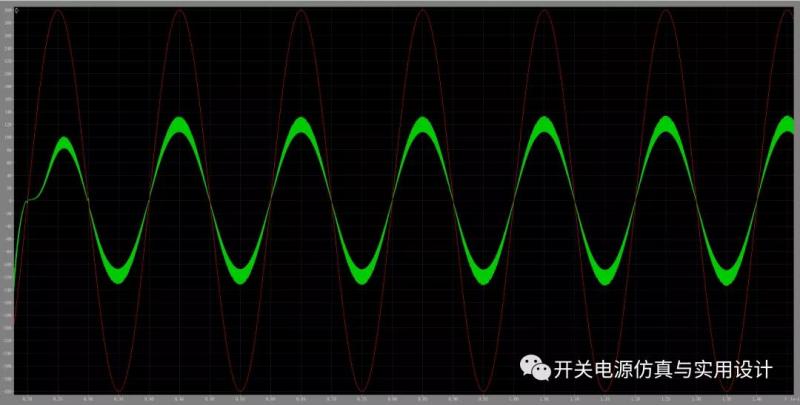 (图二 平均电流模式的输入电压和电感电流)而 CRM PFC 的控制实现,则是让电感电流的峰值呈正弦的包络线,利用三角波的平均值和峰值的关系来实现输入电流呈正弦。
(图二 平均电流模式的输入电压和电感电流)而 CRM PFC 的控制实现,则是让电感电流的峰值呈正弦的包络线,利用三角波的平均值和峰值的关系来实现输入电流呈正弦。
然后检测电感电流过零电流信号(ZCD),利用这个标志位刷新开关周期。
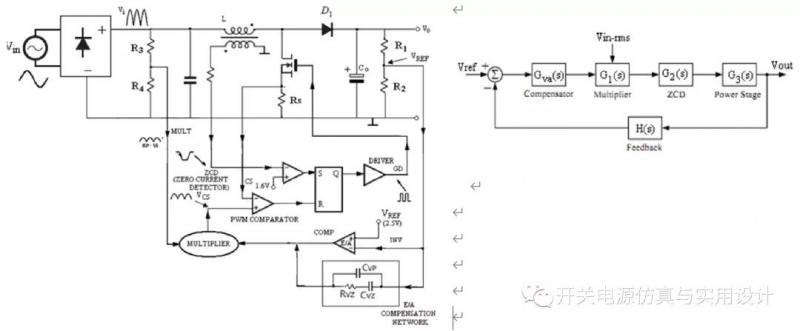
从控制模型来看,一样是把电压环的输出乘以电网电压得到电感电流的电流峰值设定,其控制模型可见图三所示,下图是 CRM 经典控制 IC,ST 的 L6562 的控制原理图。
 (图三 CRMPFC 的控制实现)下图是使用 CRM 控制的 PFC 输入电压和电流波形:
(图三 CRMPFC 的控制实现)下图是使用 CRM 控制的 PFC 输入电压和电流波形: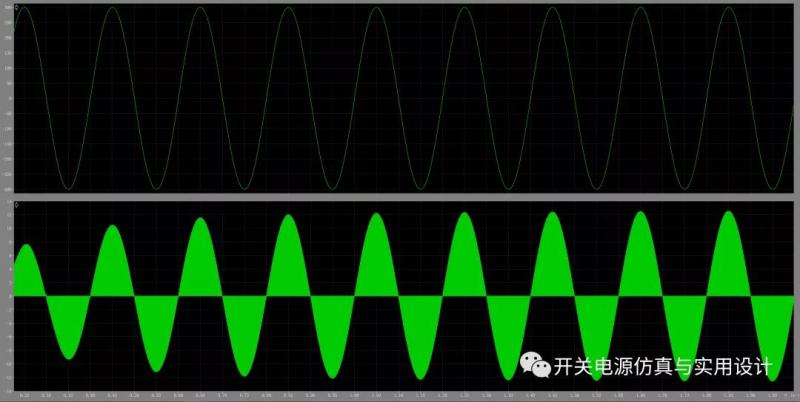 (图四 CRM PFC 的输入电压和电感电流)从两种典型的 PFC 控制方式来看,不难发现如果把滞环电流控制的低端比较值设置到零,然后依靠闭环控制器去设置滞环比较器的低端比较值~高端比较值的大小,让这个变化量呈现正弦变化,就可以让电感电流从零开始增大到峰值,且峰值的包络线跟上了正弦波形,这样实现了 CRM PFC 的功能。
(图四 CRM PFC 的输入电压和电感电流)从两种典型的 PFC 控制方式来看,不难发现如果把滞环电流控制的低端比较值设置到零,然后依靠闭环控制器去设置滞环比较器的低端比较值~高端比较值的大小,让这个变化量呈现正弦变化,就可以让电感电流从零开始增大到峰值,且峰值的包络线跟上了正弦波形,这样实现了 CRM PFC 的功能。
可见图五所示,具体的展示了 CRM PFC 的滞环控制实现。
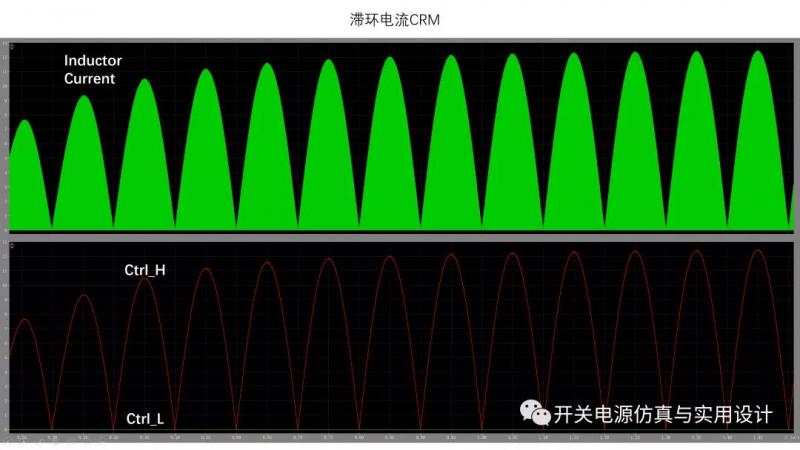 (图五 滞环电流 CRM 的 PFC 控制原理)再来看滞环电流控制的 CCM 的实现,同理只需要让滞环比较器的低端比较值~高端比较值同时跟随正弦变化,就能实时的限制住流入电感电流,也就实现 PFC 的功能,可见下图所示。
(图五 滞环电流 CRM 的 PFC 控制原理)再来看滞环电流控制的 CCM 的实现,同理只需要让滞环比较器的低端比较值~高端比较值同时跟随正弦变化,就能实时的限制住流入电感电流,也就实现 PFC 的功能,可见下图所示。
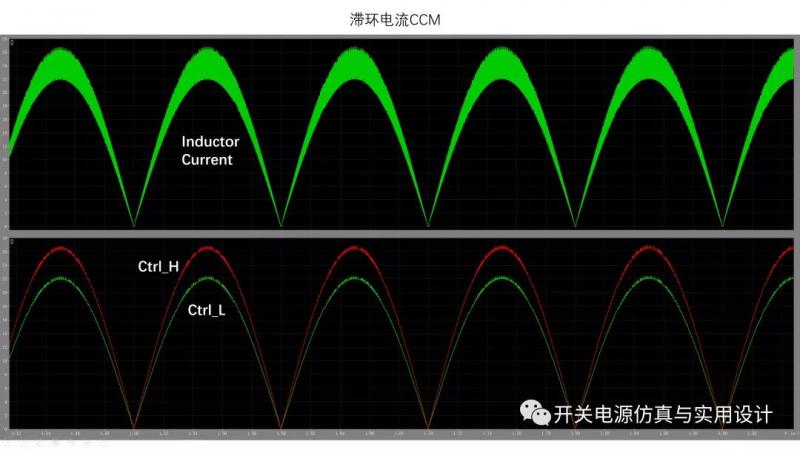 (图六 滞环电流 CCM 的 PFC 控制原理)在上文中介绍的滞环电流模式是可以实现 CCM 和 CRM 的 PFC,下面我们来聊一聊具体的控制问题,我们先来看看数字控制平均电流模式所需要的几个关键组件:电压环:用于控制输出电压稳定,低实时性。
(图六 滞环电流 CCM 的 PFC 控制原理)在上文中介绍的滞环电流模式是可以实现 CCM 和 CRM 的 PFC,下面我们来聊一聊具体的控制问题,我们先来看看数字控制平均电流模式所需要的几个关键组件:电压环:用于控制输出电压稳定,低实时性。
电流环:用于控制电感电流平均值,高实时性,通常每个开关周期控制一次。
软件锁相环:用于跟随电网电压和相位,区分出图腾柱无桥的 PWM 时序。
高速高精度 ADC:用于采样电感平均电流。
模拟比较器:用于限制开关周期电流,快速过流保护。
高精度 PWM:产生高分辨率 PWM 控制开关管。
从这几个必备的组件来看,要实现一个平均电流模式无桥图腾柱 PFC 的控制对控制器的要求还是挺高的。
所以目前行业中一般也是使用 TI 的 C2000 系列 DSP 比较多,因为控制算法中不仅有高实时性的闭环控制器在运行,还要实时运行锁相环和 AC 功率分析这些需要较多的三角函数和复杂数学计算的功能,另外为 ADC 的采样进 IIR 数字滤波也需要较多的计算量。
算力一般的 MCU,较难胜任 PFC 的控制。
作为对比,我们来看看华大 HSA8000 无桥图腾柱 PFC 控制器的特性:使用滞环电流模式控制:无需电流内环,所以提升了系统的响应速度。
ADC 的精度和转换速度要求低 :无需电流内环,所以无需采样电感电流。
仅对输出电压需要进行采样,但是 400V 的 PFC 电压通常不会需要很高的精度。
对电感量的偏移要求低:无电流内环,因为基于电感电流的纹波进行控制,所以电感量的参数偏移对控制影响不大。
环路滤波算法简单:无需计算精确的电感平均电流。
EMI 性能更好:滞环控制的自然变频。
PWM 分辨率要求低:PWM 是由检测电感电流的状态机进行处理。
过流保护能力强:实时 cycle by cycle 比较器 limits。
硬件锁相环:硬件锁相环锁定电网频率和相位,对 CPU 要求大幅度降低,释放了很多计算资源。
所以华大半导体这个无桥图腾柱 PFC 控制器,巧妙的应用滞环电流控制方法和片上模拟比较器,硬件锁相环等外设,实现 PFC 功能的同时降低了对 CPU 的计算性能要求,同时也降低了系统成本。
在之前的文章中我提到过这个控制器可以在正弦周期内自动的切换 CRM 和 CCM,比如设置切换点为 200V(PFC 输出电压 400V),那么当输入电压低于 200V 就能实现 ZVS。
当输入正弦电压继续升高,那么就自然过渡到 CCM 模式。
这样可以在高压轻负载时优化系统效率,让大部分工况都落在 CRM 模式。
当负载上升后就过渡到 CCM,这样解决了全程 CRM 模式在满负载工作时电感纹波电流大,输入差模电流大,输出电容纹波电流大的不利影响了,可以说是把 CRM 和 CCM 的优点合二为一,这确实是一种创新。
特别是在多台机器并联工作的系统中,可以把 50%负载放在 CRM 模式,这样在并联工作时就能优化效率。
下图展示了控制器实现这个功能的方法,可以看到在正弦波低于 0.5*Vpfc 处,控制器把滞环电流比较器的低端比较点设置为零了,然后通过调节低端到高端的比较值来限制电感电流。
随着电网电压高于 0.5*Vpfc 就把低端比较点提升,让电感电流进入连续模式。
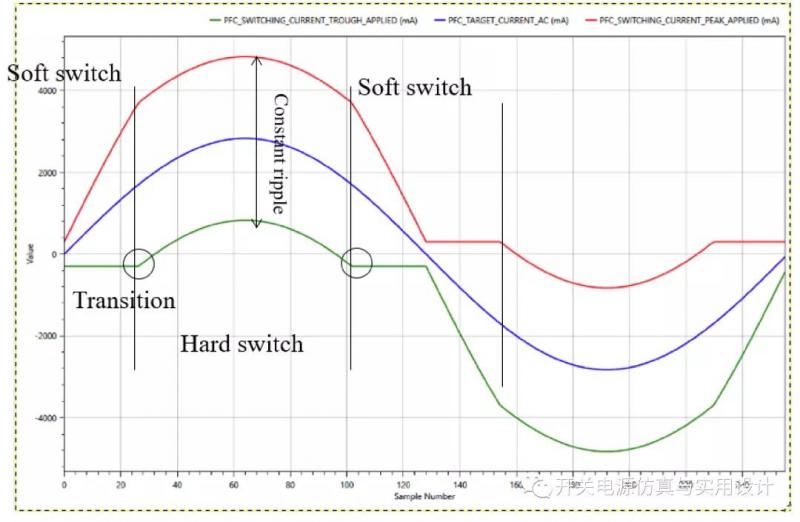 (图七 CRM 和 CCM 的过渡点)在正弦周期内插入了部分工作区域的 ZVS 范围,自然对效率有提升。
(图七 CRM 和 CCM 的过渡点)在正弦周期内插入了部分工作区域的 ZVS 范围,自然对效率有提升。
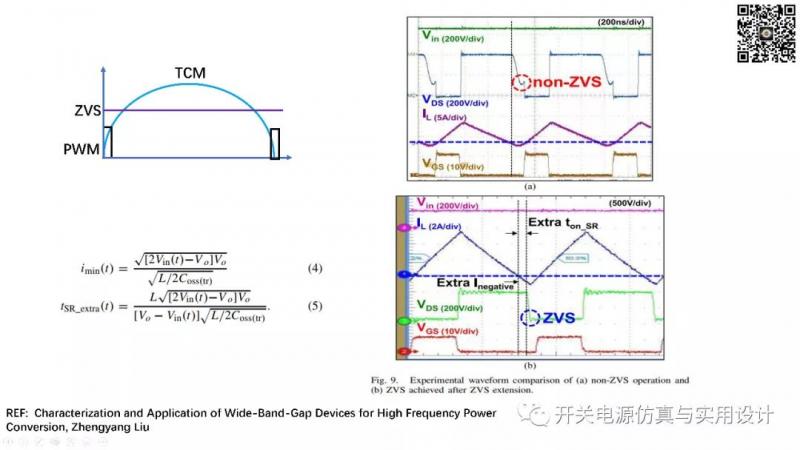
但是如果把这个功能在扩展一下,把低端比较器的值直接设置为负向值。
让电流反向流过电感为高频开关实现 ZVS 后再开启开关管,这样就实现了 TCM 模式,TCM 模式实现 ZVS 的原理可见下图所示。
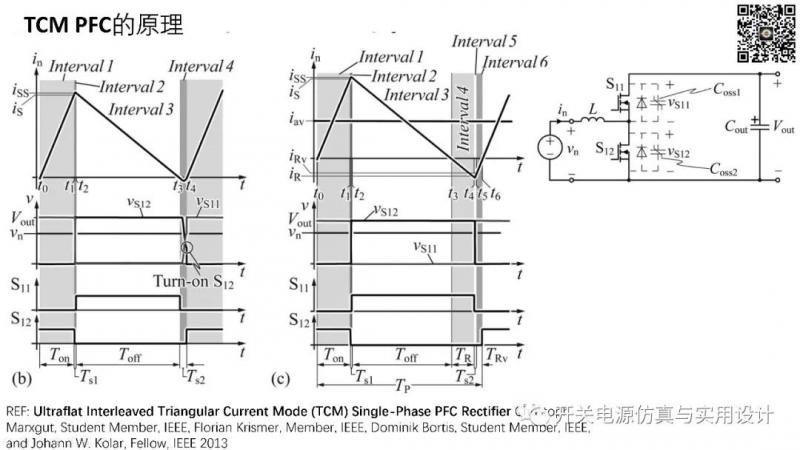 (图八 TCM 模式实现 ZVS 的原理)我觉得原厂应该对这种控制方法进行深挖,如果能让 PFC 全程工作在 TCM 模式,这样使用普通硅管也能把 PFC 的效率做到非常的高。
(图八 TCM 模式实现 ZVS 的原理)我觉得原厂应该对这种控制方法进行深挖,如果能让 PFC 全程工作在 TCM 模式,这样使用普通硅管也能把 PFC 的效率做到非常的高。
我想这一点对用户是存在非常大的吸引力的,因为这个控制器是数字内核,所以里面的控制代码是可以修改的,所以实现这一种控制方法应该是可行的。
在前几个月我花了较多的时间在研究 TCM 的 PFC 在 DSP 里面的实现方法,能想到最简单的实现是依靠预测控制加电感 ZCD 检测,环路根据负载功率计算周期时间长度,然后等抓到电感 ZCD 后,在根据输入 / 输出电压和 COSS 电荷来实时计算延迟关闭放电开关的时间长度,实现负向电流可控,最终实现 TCM 控制效果。
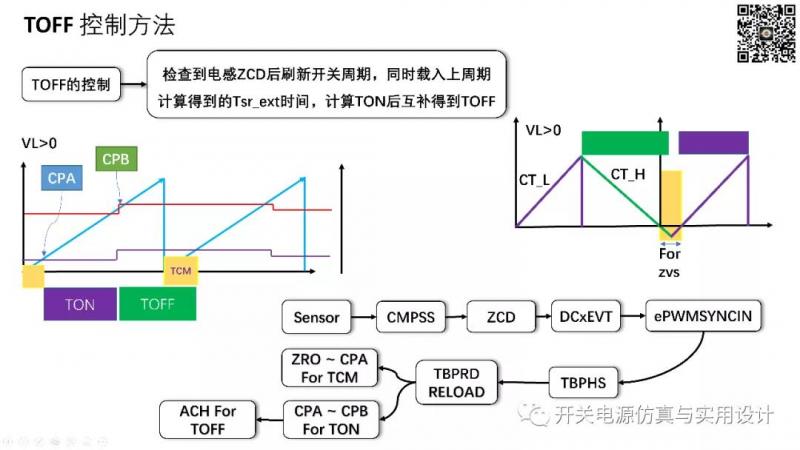 (图九 TCM 控制在 TI DSP 中的实现方法)由电流内环控制 TON 的长度,在计算实现 ZVS 所需的负向电流的扩展时间 tsr_ext,然后把 tsr_ext 写入 CPA,把 tsr_ext+TON 写入 CPB。
(图九 TCM 控制在 TI DSP 中的实现方法)由电流内环控制 TON 的长度,在计算实现 ZVS 所需的负向电流的扩展时间 tsr_ext,然后把 tsr_ext 写入 CPA,把 tsr_ext+TON 写入 CPB。
当 TON 结束后,高端开关驱动依靠死区时间模块互补产生。
高端驱动 TOFF 开通后电感电流下降,依靠 DSP 里面的 CMPSS 里面抓电感电流的 ZCD 标志,然后靠 ZCD 标志重置 TBPRD 计数器,并重载周期。
当 PWM 周期计数器的值大于 CPA 就开启低端驱动 TON,同时关闭 TOFF。
为了实现 TCM 控制,逻辑上还是比较的复杂。
 (图十 TCM 控制的负向电流算法)如果使用华大半导体的 HSA8000 控制器就能很容易的实现 TCM,在上文中已经反复提及了:只需把滞环电流低端比较值设为负值,再跟随电网电压来改变高端比较器的值即可。
(图十 TCM 控制的负向电流算法)如果使用华大半导体的 HSA8000 控制器就能很容易的实现 TCM,在上文中已经反复提及了:只需把滞环电流低端比较值设为负值,再跟随电网电压来改变高端比较器的值即可。
它是通过限制负向电流来的峰值大小实现 ZVS 控制,从实现的方法来看华大这个 IC 实现无桥图腾柱 TCM PFC 要更容易一些。
加上有硬件锁相环的支持,用起来就非常省心和方便了,这也难怪它的周边所需的物料很少。
前面介绍了 PFC 控制所需要的组件,下面来介绍由滞环电流模式控制的 PFC 的控制原理。
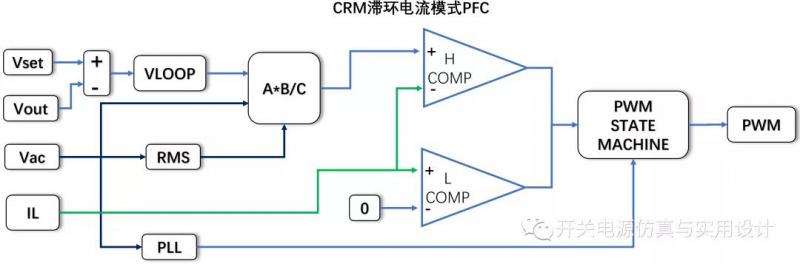
首先是滞环电流控制的 CRM PFC 框图,可见下图所示,这种实现极其简洁。
没有了电流内环,电压环的输出经过电网波形前馈后直接作用到电感电流,然后由 PWM 状态机根据锁相环得到的电网相位输出对应的 PWM。
值得注意的是我增加了电网有效值前馈,这样对系统的动态响应是有好处。
 (图十一 滞环电流模式控制的 CRM PFC)根据控制原理搭建闭环仿真模型,可见下图所示:
(图十一 滞环电流模式控制的 CRM PFC)根据控制原理搭建闭环仿真模型,可见下图所示: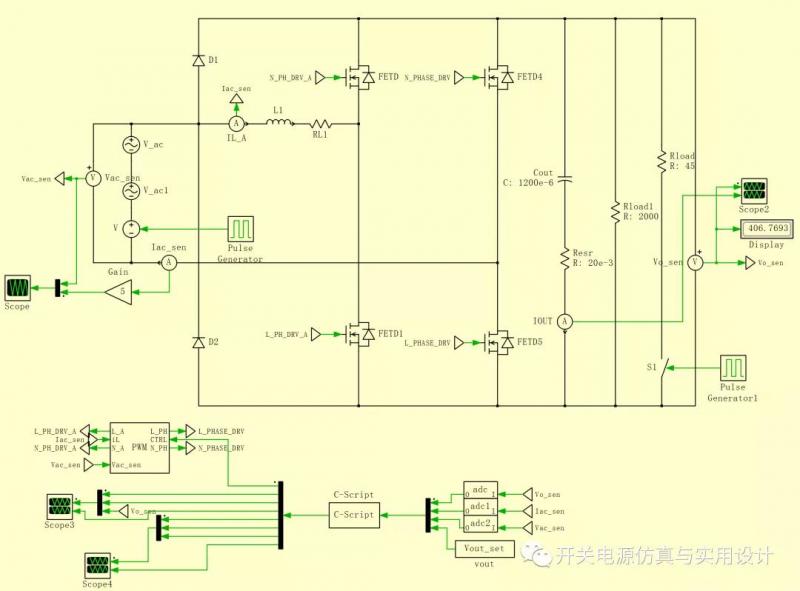 (图十二 滞环电流模式控制的 PFC 功率框架)控制逻辑部分:
(图十二 滞环电流模式控制的 PFC 功率框架)控制逻辑部分: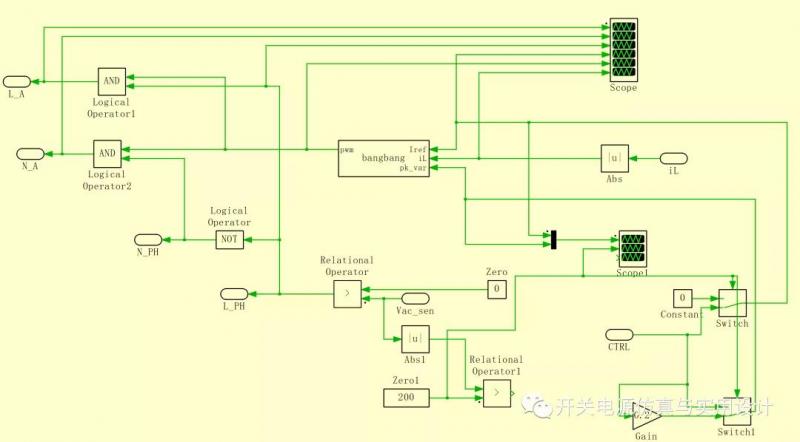 模型运行:
模型运行: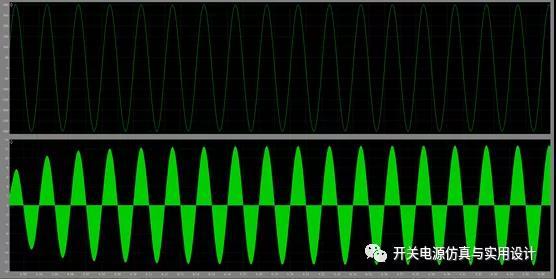 (图十四 滞环电流模式控制的 CRM PFC 仿真模型)下图是滞环控制的 CCM PFC 的控制原理,这种实现极其简洁。
(图十四 滞环电流模式控制的 CRM PFC 仿真模型)下图是滞环控制的 CCM PFC 的控制原理,这种实现极其简洁。
没有了电流内环,电压环的输出经过电网波形前馈后直接作用到电感电流,然后 PWM 状态机根据锁相环得到的电网相位输出 PWM。
与 CRM 不同是输出了电感电流的峰值和谷值用来做控制。
 (图十五 滞环电流模式控制的 CCM PFC 控制原理)控制部分仿真模型:
(图十五 滞环电流模式控制的 CCM PFC 控制原理)控制部分仿真模型: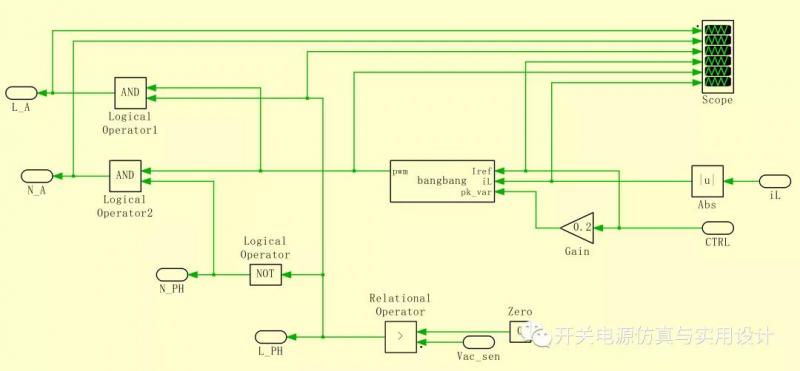 (图十六 滞环电流模式控制的 CCM 控制)运行:
(图十六 滞环电流模式控制的 CCM 控制)运行: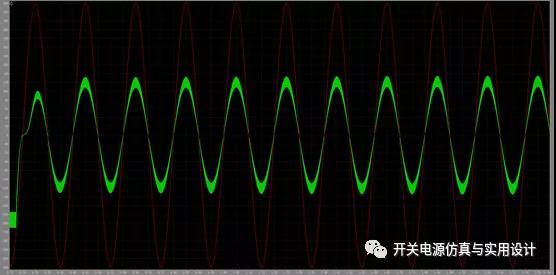 (图十七 滞环电流模式控制的 CCM 控制)小结:本文简单的介绍了滞环电流模式控制的 CRM 和 CCM PFC 的实现原理和仿真建模过程。
(图十七 滞环电流模式控制的 CCM 控制)小结:本文简单的介绍了滞环电流模式控制的 CRM 和 CCM PFC 的实现原理和仿真建模过程。
也介绍了华大半导体的 HSA8000 无桥图腾柱 PFC 控制器的优点和功能实现的原理,希望大家在应用此类控制器的时候能得心应手,手到擒来。
必须要说的是本人能力有限,如果上文中有错误的地方还请多多包涵,希望能把错误之处告诉我,共同进步,谢谢。
 在线客服1号
在线客服1号